Разработчики из Нью-Йоркского университета показали любопытный материал для 3D-печати с мрачноватым названием eFlesh. На деле цель у него максимально практичная: сделать так, чтобы роботизированные датчики и захваты уверенно работали с самыми разными предметами в неупорядоченной среде. Причем авторы проекта не стали прятать технологию за закрытыми дверями. Они выложили в открытый доступ файлы для печати, подробности сборки, обученные модели и программный код, так что при желании такой «кожей» можно оснастить собственное устройство.
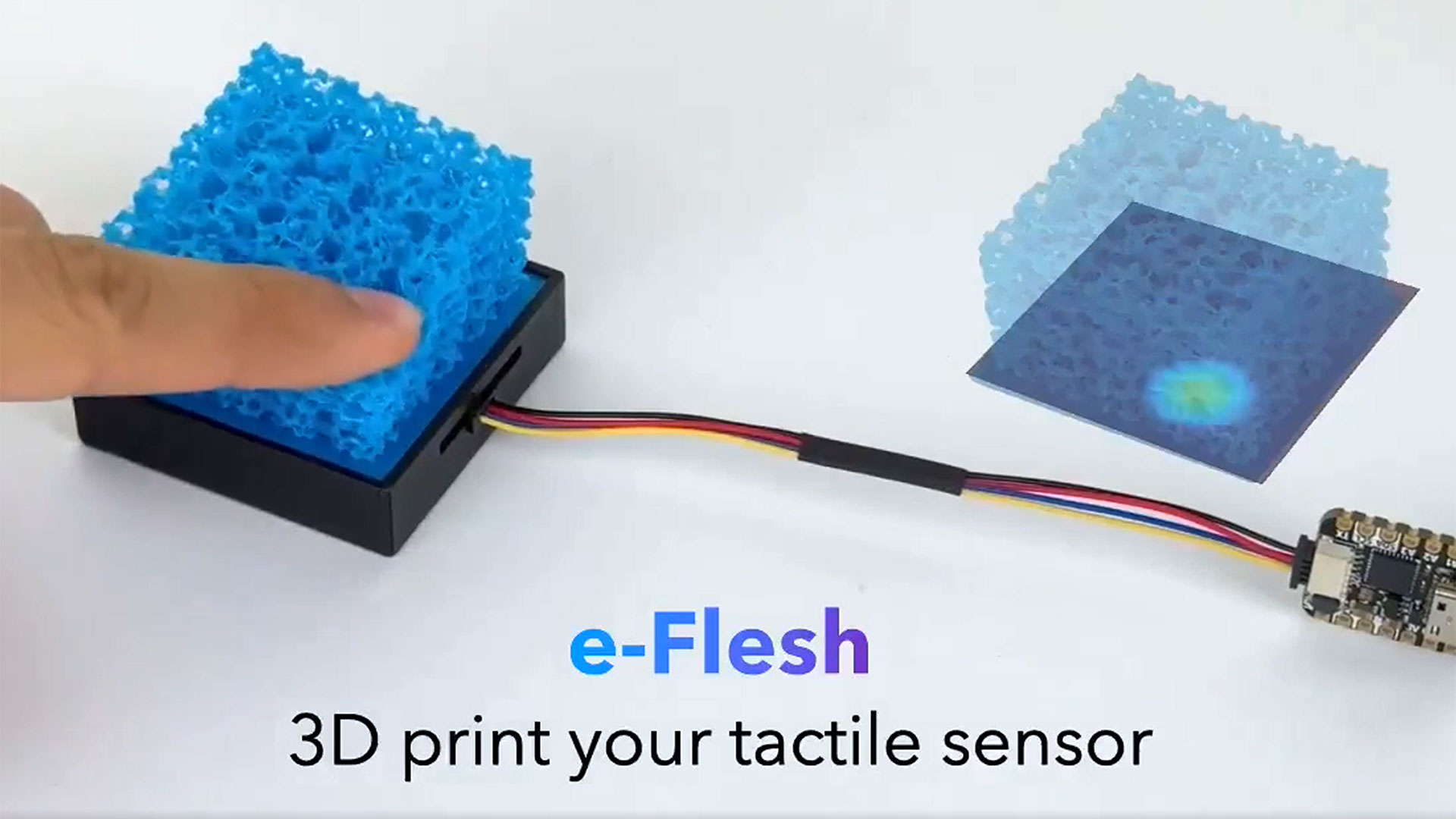
В демонстрациях eFlesh ведет себя как чувствительная накладка: захват держит предметы крепко, но без лишнего давления. Ученые показали манипуляции с USB-устройствами, мягкими игрушками и даже яйцами, которые выглядят как сырые. Отдельно подчеркивается, что печать не требует каких-то экзотических процедур. В одном из примеров использовался принтер Bambu Lab X1E, а сам процесс печати TPU-нитью на определенной высоте приостанавливали, чтобы встроить магнитную сетку. Именно она считается ключевым элементом, обеспечивающим распознавание контакта.
По словам команды, для сборки сенсора eFlesh достаточно четырех составляющих: качественного 3D-принтера, набора готовых магнитов стоимостью менее 5 долларов, простой CAD-модели нужной формы и платы с магнитометром. Чтобы упростить повторение, опубликованы STL-файлы и софт, а также инструмент, который помогает преобразовывать STL из CAD в вариант, пригодный для eFlesh.
Проблема аккуратного захвата нестандартных и хрупких объектов давно считается головной болью для инженеров, поэтому доступное и недорогое решение выглядит особенно заманчиво. Авторы заявляют о точности определения точки контакта на уровне 0,5 мм, а также о погрешности прогнозирования усилия 0,27 Н по оси z и 0,12 Н в плоскости x/y.
Важную роль играет и «умная» часть. За обнаружение проскальзывания отвечает обучаемая модель, которая, как утверждается, переносится на ранее не встречавшиеся объекты с точностью до 95%. Кроме того, сочетание визуального и тактильного контроля, по оценке разработчиков, повышает эффективность манипуляций на 40% по сравнению с подходами, где используется только зрение. Это демонстрируют на точных операциях вроде вставки штекера в розетку и протягивания кредитной карты. По сути, исследователи сделали тактильные возможности для роботов заметно ближе к массовому применению, пусть и с названием на любителя (фото: tomshardware.com).





